Дифференциальный автомат защиты, описание и установка
Админ.
Дифференциальный автомат защиты — назначение
Дифференциальный автомат защиты или автоматический выключатель дифференциального тока это комплексное устройство обеспечивающее следующие функции:
- Дифавтомат защищает проводку от перегрузок;
- Защищает электро цепь от коротких замыканий;
- Обеспечивает пожарную безопасность;
- Также дифференциальный автомат защищает от поражений электротоком, следя за появлением в цепи дифференциального тока (разницы тока в проводах цепи).
По сути, дифавтомат заменяет УЗО (устройство защитного отключения) и автомат защиты (АВ). Обозначается дифавтомат, как УЗО-Д. Например, дифавтоматы «Энергокомплекс» обозначается, как УЗО-ВАД, УЗО-ВД. Импортные дифавтоматы обозначаются по стандарту CEI EN 61009 и маркируются, как DSH, SH.
Важно! Нужно понимать, что дифавтомат не устранит ощущение удара электротоком. Он отключит аварийную цепь за время, которое электроток не успеет нанести урон здоровью человека.
Для владельцев земельных участков, садоводов и огородников будет полезно знать, что лучшие форсунки для опрыскивателей можно выбрать на сайте https://hydromech.in.ua/ru/forsunki/. В каталоге сайте более сотни вариантов форсунок: маятниковые, вращающиеся, на трубу, на шланг, с одной или тремя головками.
Установка дифавтомата защиты
При установке устройства соблюдайте требования электробезопасности.
Установка дифавтомата защиты производится в электрических щитках. Рекомендуется, устанавливать вводной дифавтомат на этаже в этажном щите, а дифавтоматы на отдельные группы розеток квартиры устанавливать в квартирном электрощите.
Устанавливается дифавтомат на дин-рейку. Подвод электропитания осуществляться сверху, вывод осуществляется с нижних клемм.
Заземление электро цепи
Корректная защита от косвенного прикосновения возможна только при организации заземления, например, системы заземления TN-S.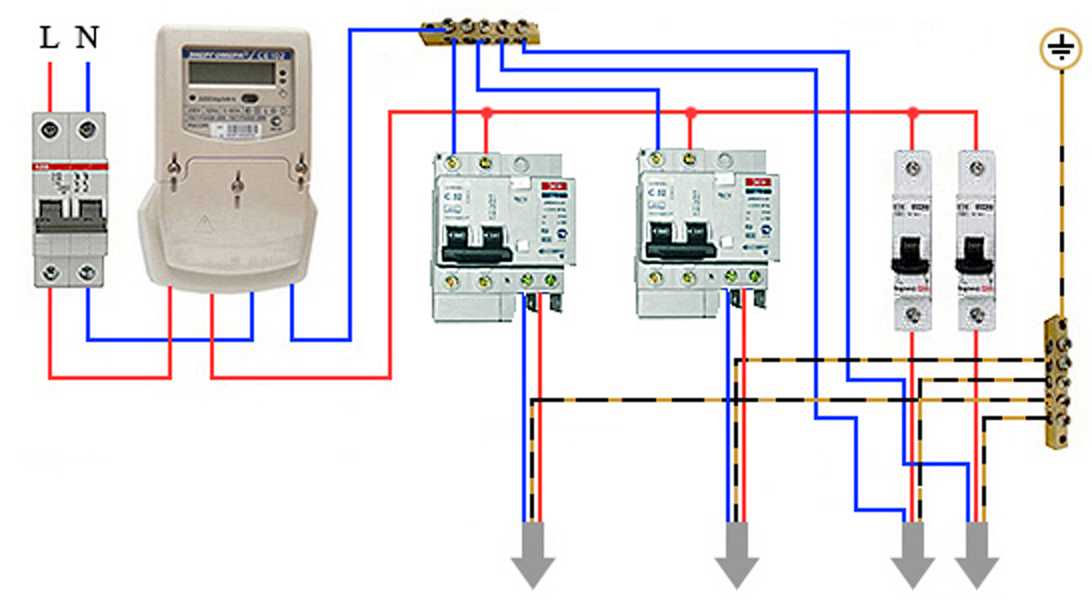
В зоне действия УЗО-Д нулевой рабочий проводник (N) не должен соединяться с заземленными корпусами электроприборов и нулевым защитным проводником (PE).
Типы и номиналы дифавтоматов защиты
В жилых помещениях с компьютерами, телевизором, приборами с электронным управлением и другими приборами, создающими пульсирующие составляющие тока, ставятся дифавтоматы типа «А». В других сетях достаточно дифавтоматов типа «АС».
В групповых цепях квартиры, питающих штепсельные розетки, ставятся УЗО номиналом не более 30mA. Для группы электропроводки ванной желательно поставить дифавтомат с током отсечки 10 mA. На группы освещения дифавтоматы не ставятся.
Согласно ПУЭ, ток утечки диффавтомата для электроприбора выбирается из расчета 0,4mA на 1 Ампер тока нагрузки. Ток утечки диффавтомата сети, выбирается из расчета 0,01 mA на 1 метр фазного провода.
Для повышения пожарной безопасности дома, квартиры нужно на ввод электропитания установить УЗО-Д с током отсечки 100mA или 300mA. Обычно в квартирах, такие «дифы» не ставятся.
Обычно в квартирах, такие «дифы» не ставятся.
Проверка работоспособности дифавтомата
Для проверки исправности автоматического выключателя дифференциального тока (АВДТ) на корпусе устройства есть кнопка тестирования. Проверку устройства нужно производить сразу после установки и потом, раз в месяц.
Дифференциальный автомат защиты: Схема подключения
Приведу две схемы подключения дифавтомата защиты.
Схема №1
Схема установки одного дифавтомата на всю электросеть
Схема№2
Желательно, для каждого прибора нуждающегося в защите, ставить отдельный дифавтомат защиты.
Нормативные ссылки дифференциальный автомат защиты
ПУЭ изд. 7, п. 7.1.67-7.1.86.
©ehto.ru
Еще статьи
Защита электрикидифавтомат что это такое, дифференциальный автомат защиты, защита проводки, ссылка, схема электропроводки квартиры дома, ток электрический, устройство электрики, цепь электрическая квартиры домаДифавтоматы: выбор и подключение
Дифференциальный автомат – подключается для обеспечения защиты от поражения электрическим током, одновременно с защитой электросети от перегрузок и короткого замыкания.
Где устанавливается
Диф-автомат устанавливается только на DIN-рейку в распределительном щитке квартиры или дома. К автомату подключаются блоки розеток или отдельные мощные электроприборы – стиральная машина, электропечь, электродуховка или водонагреватель.
Стиральная машина, морозильная камера, насос – эти приборы имеют в своей конструкции электродвигатель, поэтому их пусковая потребляемая мощность может превышать заявленную фирмой – производителем в несколько раз. Приводим таблицу с указанием коэффициентов возрастания токов в начале работы прибора:
Время действия пусковых токов в бытовых приборах
Таким образом, стиральная машина при включении может потреблять 12,5 кВт в течении первых 4х секунд, а если дифавтомат для нее не рассчитан на такую мощность – каждый раз при включении он будет выбивать. Но это не означает, что нужно выбирать дифференциальный автомат, мощностью 12,5 кВт!
Условные обозначения
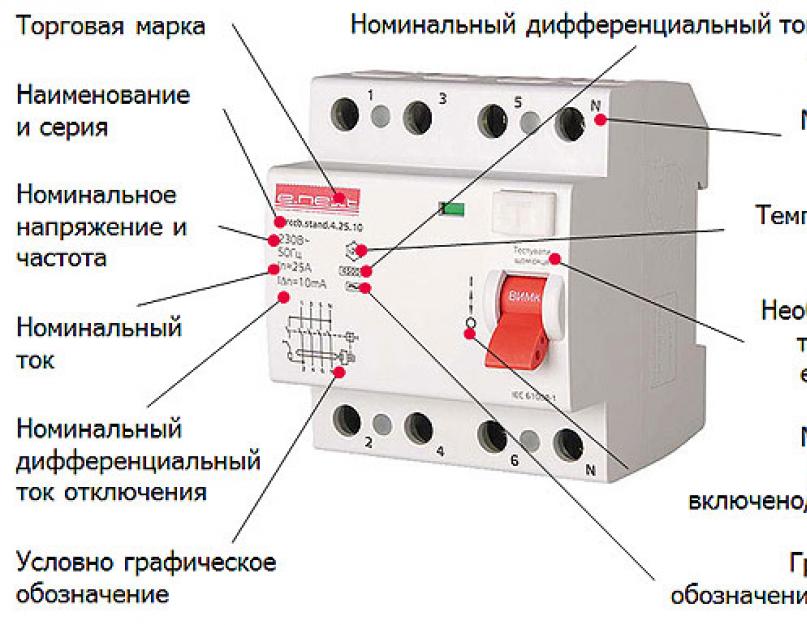
Дифавтоматы поставляются обычно с паспортами, в которых указываются все данные, но многие из них дублируются на корпусе устройства. Здесь вы можете прочитать информацию о номинальном напряжении, частоте и мощности, дифференциальном токе отключения, температурный диапазон использования автомата. В отличие от инструкции, обозначения на корпусе со временем не потеряются и при открытии распределительного щитка вы всегда будете знать, на какой автомат можно добавить нагрузку, а на какой нет.
Здесь вы можете прочитать информацию о номинальном напряжении, частоте и мощности, дифференциальном токе отключения, температурный диапазон использования автомата. В отличие от инструкции, обозначения на корпусе со временем не потеряются и при открытии распределительного щитка вы всегда будете знать, на какой автомат можно добавить нагрузку, а на какой нет.
Условные обозначения на дифавтомате
Какой дифавтомат выбрать
Дифференциальный автомат соединяет в себе одновременно три функции, защита проводки от короткого замыкания, защита проводки от перенапряжения и защиты человека от удара электрическим током или утечки электричества. При планировании проводки в квартире или доме можно рассчитать количество потребителей тока, которые планируется подключать к сети, подсчитать время их работы и что будет включаться одновременно, а что нет. И ошибиться 🙂
- Дифавтомат ABB на 10А тип С
- Дифавтомат ABB на 16А тип С
- Дифавтомат ABB на 25А тип С
Дифференциальный автомат устанавливается для тех мест, где возможно поражение электрическим током.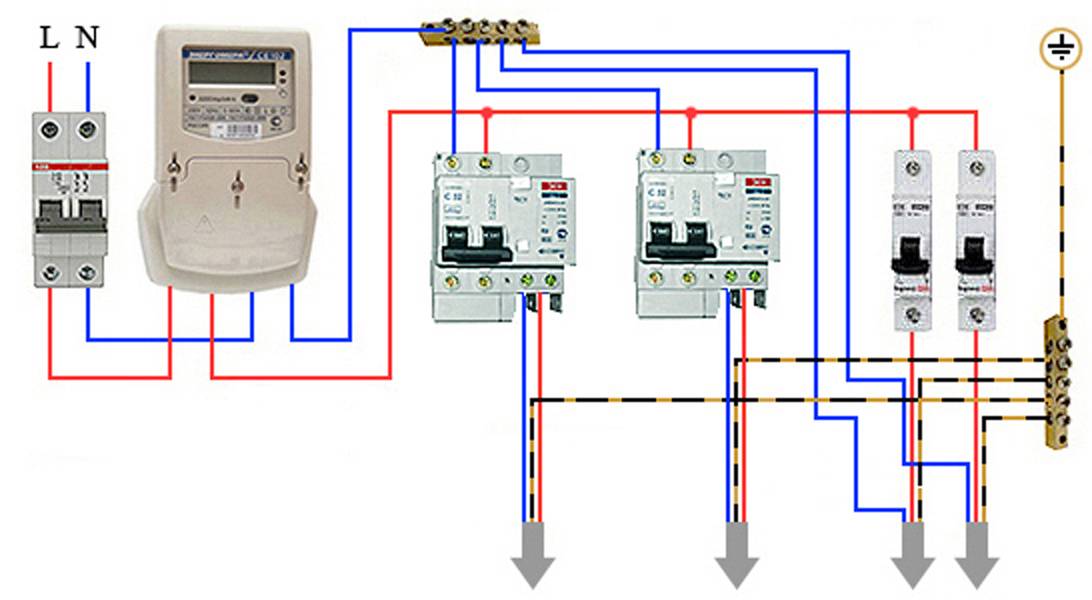 В квартире под дифавтоматы подключают розетки и выключатели в ванной комнате и кухне. Именно в этих местах наиболее вероятно поражение током, т.к. имеется избыточная влажность и опасность протекания от соседей сверху. Если в вашем случае есть места, где также есть опасность контакта электрики с водой, например сауна, бассейн или холл с фонтаном, то такие комнаты следует также запитать через диф-автомат.
В квартире под дифавтоматы подключают розетки и выключатели в ванной комнате и кухне. Именно в этих местах наиболее вероятно поражение током, т.к. имеется избыточная влажность и опасность протекания от соседей сверху. Если в вашем случае есть места, где также есть опасность контакта электрики с водой, например сауна, бассейн или холл с фонтаном, то такие комнаты следует также запитать через диф-автомат.
Каждая такая комната запитывается двумя контурами, каждый из которых подключается через отдельный автоматический дифференциальный автомат. Это контуры освещения и розеток:
- Розетки – автомат на 16А, тип С;
- Освещение – автомат на 10А, тип С;
Под отдельный диф-автомат подключаются:
- Проточный водонагреватель;
- Накопительный водонагреватель;
- Электроварочная панель;
- Электродуховой шкаф;
- Кондиционер.
Проточный водонагреватель, электроварочная панель и электродуховка подключаются под диф-автоматы на 25А, тип С.
Важно. Если варочная панель и духовка – это два разных прибора, то они должны подключаться под разные диф-автоматы.
Не стоит подбирать отдельный дифавтомат для стиральной машины, микроволновки или пылесоса. Все эти приборы рассчитаны на включение в обычную электросеть, а значит отдельно беспокоиться об их безопасности не стоит.
Видео о технических характеристиках дифавтоматов
Ролик подробно описывает технические характеристики дифференционных автоматических выключателей. Видео будет полезно тем, кто ищет более углубленную информацию по теме и решает специфические вопросы по электрообеспечению офиса, производственного участка или иного коммерческого помещения.
Некоаксиальные двигатели улучшают дифференциальные приложения
Автор: |
 Кейси
Кейси В 1890 г. два выходных вала с одной цепью, обеспечивающей поворот на 180 ° для вращения в одном направлении с приводным валом. Более поздние изобретения описывали многороторные электрические машины для железнодорожных, морских и автомобильных двигателей. Сегодня, благодаря быстрому совершенствованию технологии управления и снижению затрат, возобновился интерес к многороторным электрическим машинам для трансмиссии электромобилей.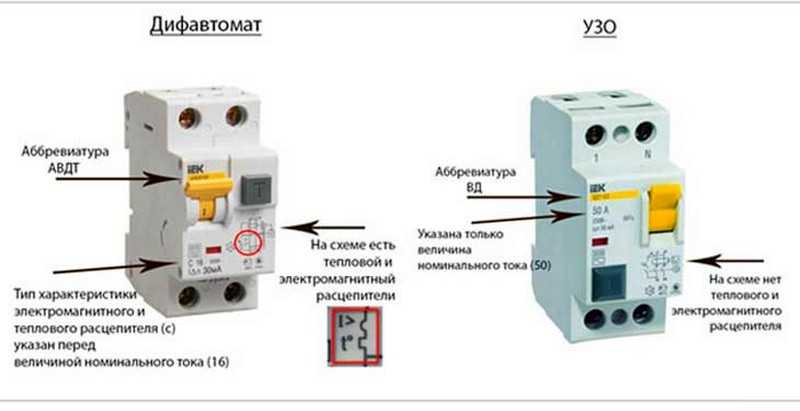 Витая цепь осталась в прошлом, ее заменили высокотехнологичные системы управления двигателем.
Витая цепь осталась в прошлом, ее заменили высокотехнологичные системы управления двигателем.
До недавнего времени многороторно-дифференциальные электрические машины подразделялись на две категории конструкции: радиально-слоистая конструкция с концентрически зажатыми роторами или бок о бок с аксиально смежными роторами. По большей части эти конструкции имели роторы соосные или на одной линии друг с другом. Тем не менее, можно привести некоаксиально-дифференциальную электрическую машину для использования в автомобильных трансмиссиях, морских силовых установках, химическом смешивании, компактных обрабатывающих установках, разделении материалов и отклоняющих конвейерах, и это лишь некоторые из них.
Электрическая машина с несоосными роторами содержит не менее двух роторов с осями вращения, не совпадающими на одной геометрической прямой. Подходит любой тип ротора, в том числе индукционный, с обмоткой, с постоянным магнитом и с магнитным сопротивлением. Обычно они работают либо в радиальном, либо в осевом поле потока. Корпус в сборе образует жесткий каркас, который удерживает оси ротора в фиксированной ориентации по отношению друг к другу, а также, по меньшей мере, одну обмотку статора. Электронное управление управляет передачей электроэнергии к обмоткам статора или от них. Хотя между роторами может быть электромагнитное взаимодействие, они не связаны механически внутри электрической машины. Роторы могут вращаться с одинаковой или разной скоростью и в одном и том же или противоположном направлении.
Корпус в сборе образует жесткий каркас, который удерживает оси ротора в фиксированной ориентации по отношению друг к другу, а также, по меньшей мере, одну обмотку статора. Электронное управление управляет передачей электроэнергии к обмоткам статора или от них. Хотя между роторами может быть электромагнитное взаимодействие, они не связаны механически внутри электрической машины. Роторы могут вращаться с одинаковой или разной скоростью и в одном и том же или противоположном направлении.
Например, несоосно-дифференциальная электрическая машина с радиальным потоком может работать как дифференциальный привод между левым и правым колесами автомобиля. Это может быть выгодно для конструкции кузова, дорожного просвета и угла наклона карданного вала. Другими преимуществами могут быть снижение затрат и повышение производительности по сравнению с традиционными механическими дифференциальными коробками передач.
В случае механического дифференциала колесо, теряющее сцепление с дорогой, вращается с низким приложенным крутящим моментом, ограничивая крутящий момент, передаваемый на другое колесо. Чтобы преодолеть этот конструктивный недостаток, механические дифференциалы иногда оснащаются системами механической блокировки, ограничения проскальзывания или электронными системами контроля тяги. В отличие от механических дифференциалов, которые всегда передают одинаковый крутящий момент на оба колеса, дифференциальная электрическая машина может передавать более высокий крутящий момент на колесо, поддерживающее сцепление с дорогой.
Чтобы преодолеть этот конструктивный недостаток, механические дифференциалы иногда оснащаются системами механической блокировки, ограничения проскальзывания или электронными системами контроля тяги. В отличие от механических дифференциалов, которые всегда передают одинаковый крутящий момент на оба колеса, дифференциальная электрическая машина может передавать более высокий крутящий момент на колесо, поддерживающее сцепление с дорогой.
Рассмотрим электрическую машину с идентичными асинхронными роторами асинхронного типа и электронным управлением с двумя обмотками статора, питающимися от одночастотного источника переменного напряжения. Если одно колесо начинает вращаться, в то время как тяга удерживает другое, к вращающемуся колесу прикладывается минимальный крутящий момент, в то время как крутящий момент, передаваемый неподвижному колесу, увеличивается по мере увеличения выходной частоты контроллера. Если и второе колесо теряет сцепление с дорогой, вероятно, пора вызывать эвакуатор.
В общем случае, если выходная частота контроллера создает синхронную скорость выше скорости обоих роторов, то оба ротора будут работать как двигатели. Если синхронная скорость подачи меньше скорости обоих роторов, то оба ротора действуют как тормоза. Регенерированная энергия возвращается через контроллер в устройство накопления энергии. Если синхронная скорость источника находится между двумя скоростями ротора, то более быстрый ротор работает как генератор, а более медленный ротор действует как двигатель.
Однако эта одночастотная схема управления имеет один недостаток в дифференциале автомобиля. Во время поворота на более медленное внутреннее колесо передается больший крутящий момент, чем на более быстрое внешнее колесо. К сожалению, это означает, что колесо с меньшим сцеплением из-за наклона кузова получает больший крутящий момент. Эта ситуация самокорректируется в том смысле, что если внутреннее колесо начинает проскальзывать, энергия, подаваемая на это колесо, падает (уменьшая крутящий момент), в то время как энергия, подаваемая на внешнее колесо, остается неизменной, сохраняя тот же крутящий момент.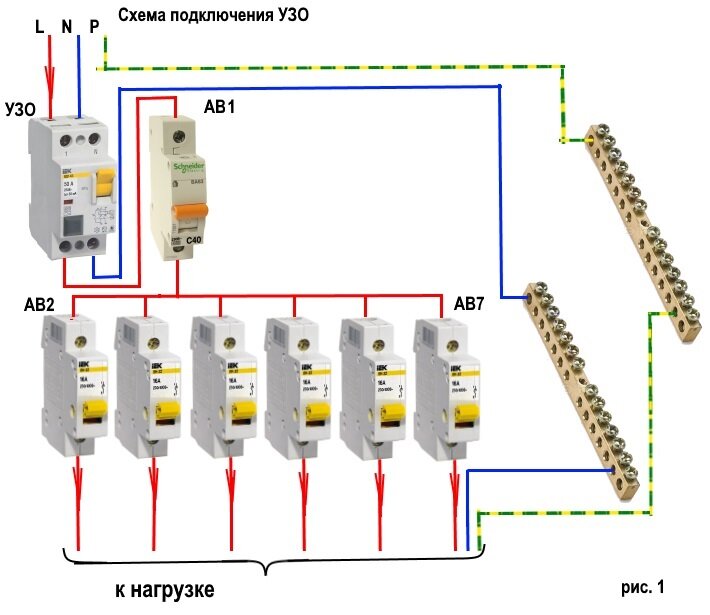
Можно настроить систему управления для отдельного питания каждого набора обмоток статора собственной независимой частотой. Это разделяет энергию, подаваемую на каждое колесо, для регулировки крутящего момента по желанию на основе обратной связи от датчиков скорости вращения колес.
Несоосно-дифференциальная электрическая машина с осевым магнитным потоком и дисковыми роторами может иметь планетарные редукторы на выходных валах. Для роторов синхронного типа, например, с постоянным магнитом, электромагнитом или магнитным сопротивлением, для электронного управления требуется датчик положения для каждого ротора. Простой метод создания дифференциальных скоростей с двумя синхронными роторами состоит в том, чтобы подавать на каждую группу обмоток статора свой собственный независимый ток. Однако, если синхронные роторы имеют разное количество полюсов, они могут приводиться в движение с разной скоростью за счет подачи одного тока, который накладывает два переменных тока с разными частотами.
Как правило, асинхронные двигатели работают более эффективно при высокой скорости и низком крутящем моменте, тогда как двигатели с постоянными магнитами более эффективно работают при низкой скорости и высоком крутящем моменте. Оба типа могут быть встроены в одну несоосно-дифференциальную электрическую машину.
Например, машина может содержать один асинхронный ротор с короткозамкнутым ротором и один синхронный ротор с двойным корпусом. Асинхронный ротор приводит в движение задние колеса полноприводного автомобиля через карданный вал и механический дифференциал. Синхронный ротор аналогичным образом приводит в движение передние колеса. Электронное управление получает обратную связь по крутящему моменту от каждого ротора. Когда транспортное средство работает в крейсерских условиях с высокой скоростью и низким крутящим моментом, питание подается только на статор асинхронного ротора. Когда требуемый крутящий момент превышает установленный уровень из-за условий запуска или большой нагрузки, электронное управление синхронизирует свою выходную частоту и подает питание на статор для синхронного ротора. Когда требуемый крутящий момент падает ниже заданного уровня, статор синхронного ротора отключается.
Когда требуемый крутящий момент падает ниже заданного уровня, статор синхронного ротора отключается.
В морских условиях несоосная дифференциальная электрическая машина может работать как носовое подруливающее устройство. Машина монтируется в некоаксиальном туннеле через нос судна. Поскольку некоаксиальные отверстия туннеля повторяют контуры корпуса, сопротивление движению вперед меньше по сравнению с прямым туннелем с открытой передней стенкой. Управляющие гребные винты, установленные на роторах каждой электрической машины, обеспечивают поток с переменной скоростью в любом направлении через туннель. Винты могут быть одинаковыми и вращаться в одном направлении или иметь противоположный шаг и вращаться в противоположных направлениях. Последний отменяет крутящий момент и обеспечивает более точное управление.
Еще одно применение несоосных дифференциальных электрических машин связано с применением смешивания химических веществ. Общий узел корпуса фиксирует оси ротора под углом для разделения лопастей, сохраняя при этом компактность узла двигатель-головка. Хотя оси ротора могут быть параллельными, как в традиционном кухонном миксере, наклонные или скошенные оси обеспечивают более тщательное перемешивание.
Хотя оси ротора могут быть параллельными, как в традиционном кухонном миксере, наклонные или скошенные оси обеспечивают более тщательное перемешивание.
Третий ротор и лопасть добавят перемешивания. Программирование электронного управления может включать циклы смешивания с реверсированием лопастей и изменением скорости по мере необходимости.
Другие области применения некоаксиальных двигателей включают операции механической обработки. Например, станки с перпендикулярными роторами могут создать компактный обрабатывающий агрегат для изготовления цилиндрической детали с канавкой. Заготовка вставляется через опорный подшипник и зажимается в цанговом патроне. Электронные средства управления контролируют ротор заготовки и ротор инструментального шпинделя, одновременно задействуя соленоид, чтобы выдвинуть инструментальный шпиндель и контактировать с заготовкой. Это похоже на удлинение вала-шестерни в автомобильном стартере. В этом случае электронное управление крепится к корпусу в сборе.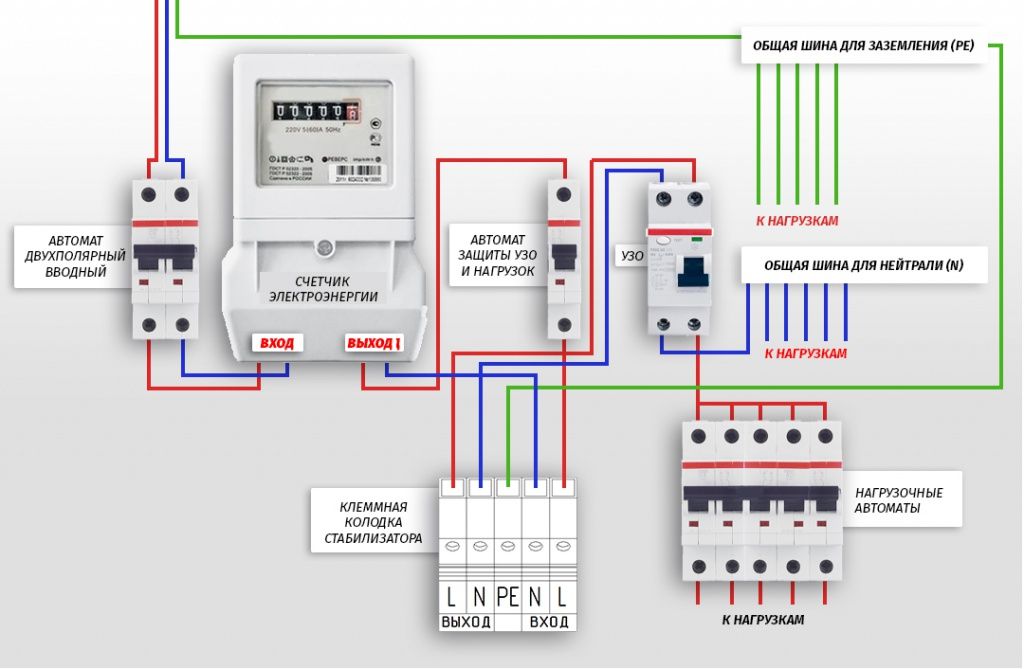 Бесконтактный переключатель определяет, когда цикл обработки завершен.
Бесконтактный переключатель определяет, когда цикл обработки завершен.
Последний пример — электрическая машина с несоосными роторами для разделения материалов. Ролики крепятся к каждому из роторов. Если несоосные ролики управляют волокнистым полотном, они обеспечивают разрывное действие, помогающее в разрезании и разделении. Нож, расположенный перед узлом корпуса, инициирует раскалывание.
В качестве альтернативы электрическая машина с несоосными роторами может обеспечить компактный привод для расходящихся конвейерных лент.
© 2011 Penton Media, Inc.
Упрощенный электронный дифференциал с скользящим режимом для электромобиля с двумя независимыми ведущими колесами
Энергетика и энергетика
Том 5 №6 (2013 г.), ID статьи:35916,6 стр. DOI:10.4236/epe. 2013.56044
Упрощенный электронный дифференциал с скользящим режимом для электромобиля с двумя независимыми ведущими колесами
Азеддин Драу
Факультет электротехники, Хаильский университет, Хаиль, Саудовская Аравия
Электронная почта: adraou@yahoo. com
com
Copyright © 2013 Azeddine Draou. Это статья с открытым доступом, распространяемая в соответствии с лицензией Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии надлежащего цитирования оригинальной работы.
Поступила в редакцию 19.05.2013 г.; пересмотрено 19 июня 2013 г.; принято 26 июня 2013 г.
Ключевые слова: Электромобиль; Управление скользящим режимом; электронный дифференциал; Синхронный двигатель с постоянными магнитами; Многомашинная многоконвертерная система
АННОТАЦИЯ
В этой статье представлена простая стратегия управления скользящим режимом, используемая для электронной дифференциальной системы электромобиля с двумя независимыми ведущими колесами. Когда транспортное средство движется по криволинейной дороге, скорость внутреннего колеса должна отличаться от скорости внешнего колеса, чтобы транспортное средство не вибрировало и не двигалось по неровной траектории. Поскольку каждое колесо этого электромобиля имеет независимую движущую силу, для замены системы зубчатого дифференциала требуется электрическая дифференциальная система. Однако трудно анализировать нелинейное поведение дифференциальной системы в зависимости от скорости и угла поворота рулевого колеса, а также конструкции автомобиля. Предлагаемая двигательная установка состоит из двух синхронных машин с постоянными магнитами, обеспечивающих привод двух задних ведущих колес. Предлагаемая структура управления, называемая независимыми машинами для контроля скорости, позволяет получить электронный дифференциал, который обеспечивает контроль поведения автомобиля на дороге. Он также позволяет независимо контролировать каждое ведущее колесо, чтобы оно вращалось с разной скоростью по любому изгибу. В данной статье представлены результаты анализа и моделирования предлагаемой системы.
Поскольку каждое колесо этого электромобиля имеет независимую движущую силу, для замены системы зубчатого дифференциала требуется электрическая дифференциальная система. Однако трудно анализировать нелинейное поведение дифференциальной системы в зависимости от скорости и угла поворота рулевого колеса, а также конструкции автомобиля. Предлагаемая двигательная установка состоит из двух синхронных машин с постоянными магнитами, обеспечивающих привод двух задних ведущих колес. Предлагаемая структура управления, называемая независимыми машинами для контроля скорости, позволяет получить электронный дифференциал, который обеспечивает контроль поведения автомобиля на дороге. Он также позволяет независимо контролировать каждое ведущее колесо, чтобы оно вращалось с разной скоростью по любому изгибу. В данной статье представлены результаты анализа и моделирования предлагаемой системы.
1. Введение
Электромобиль с двигателями в колесах имеет замечательное преимущество в быстром создании точного крутящего момента на каждом ведущем колесе [1,2].

2. Предлагаемая тяговая система
Классическая схема тяговой системы электромобиля представлена на рисунке 1 [5].
Рис. 1. Обычная конструкция автомобиля с одним центральным двигателем.
На рис. 2 показана конструкция электромобиля, два задних колеса приводятся в движение двумя тяговыми двигателями через редукторы и карданные валы [6]. На этом рисунке представлена реализованная конфигурация транспортного средства с двумя синхронными двигателями с постоянными магнитами для двух независимых колес.
Многомашинные системы характеризуются соединением различных систем электромеханического преобразования. Система, представленная на рис. 2, характеризуется только одной муфтой, которая показана на рис. 3. Для разработки электронного дифференциала к силовой установке двух ведущих колес применяется структура управления «независимые машины» посредством управления скоростью, как показано на рис.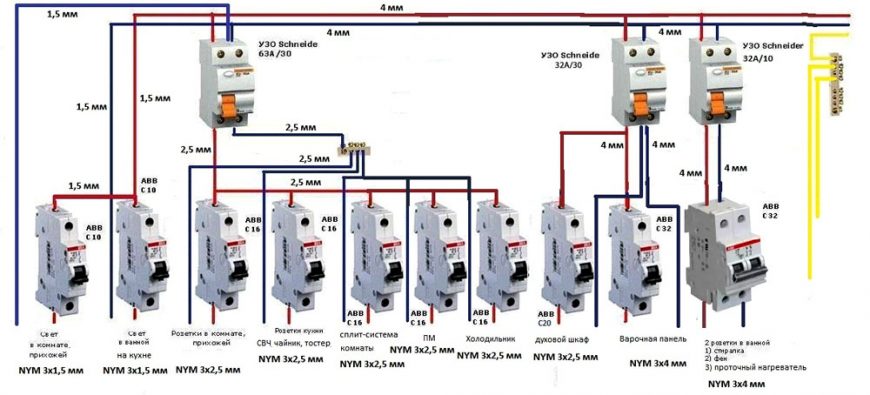 4.
4.
Независимая система управления машиной
Эта структура состоит из двух машин, управляемых независимо как две отдельные структуры машины. Для каждой машины мы можем задать разное задание скорости () с помощью двух статических преобразователей. Эти машины не связаны через структуру управления и отвергают все помехи, как управление одной машиной.
Рис. 2. Конструкция автомобиля с двумя независимыми приводами на задние колеса.
Рис. 3. Исследуемая топология.
Рис. 4. Независимая структура машины.
принцип этого управления показан на рисунке 4.
Энергетическое макроскопическое представление (ЭМИ) двигательной установки было предложено для получения общего представления об электронном дифференциале, как показано на рисунке 5.
В этом исследовании предлагается управление скоростями ведущих колес и структурой управления «независимые машины». Эта структура позволяет наложить два задания скорости (т. е. по кривой), приложенный крутящий момент к каждому колесу разный, система управления двумя колесами не получает одинаковое задание крутящего момента. Таким образом, невозможно установить одно и то же задание скорости.
по кривой), приложенный крутящий момент к каждому колесу разный, система управления двумя колесами не получает одинаковое задание крутящего момента. Таким образом, невозможно установить одно и то же задание скорости.
Электронная дифференциальная система использует скорость автомобиля и угол поворота рулевого колеса в качестве входных параметров и рассчитывает требуемую скорость внутреннего и внешнего колес, когда два задних колеса управляются независимо двумя двигателями PMS. Входными данными эталонного блока являются скорость транспортного средства и угол поворота рулевого колеса, а выходными данными являются требуемые скорости вращения внутреннего и внешнего колес, называемые эталонными скоростями. В зависимости от направления угла поворота рулевого колеса (влево или вправо) скорость вращения внутреннего и внешнего колес соотносится со скоростью вращения левого и правого колес соответственно.
Силовая структура состоит из двух синхронных двигателей с постоянными магнитами, которые питаются от двух трехфазных инверторов и приводят в движение два задних колеса автомобиля через редукторы, как показано на рис. 6.
6.
3. Векторное управление
Рис. 7 иллюстрирует Схема векторного управления синхронным двигателем с постоянными магнитами. Он представляет собой систему управления скоростью и током.
Для упрощения алгоритма управления и повышения надежности контура управления предлагается использовать стратегию управления скользящим режимом.
Уравнения СДПМ имеют следующий вид:
(1)
где
(2)
ЭМИ электронной системы дифференциала.
Рисунок 6. Компоненты предлагаемой системы.
Рис. 7. Блок-схема системы электропривода двигателей с постоянными магнитами.
— Регулятор скользящего режима скорости и тока Используя нелинейную модель СДПМ «Уравнение (1)», можно спроектировать регулятор скользящего режима как скорости, так и тока [7,8]. Определим поверхность скольжения
(3)
где и — задание скорости и ток статора соответственно.
Чтобы определить закон управления, который должен свести функцию скольжения (3) к нулю за конечное время, необходимо рассмотреть динамику, описываемую:
(4)
где
В методе устойчивости Ляпонова используется для обеспечения привлекательности и инвариантности, должно выполняться следующее условие
(5)
Таким образом, можно выбрать следующий закон управления переключением напряжений статора:
(6)
где,
Скользящий режим вызывает резкие изменения регулируемой переменной, вносящие высокочастотные помехи. Для уменьшения явления дребезга введена функция насыщения вместо переключающей:
Для уменьшения явления дребезга введена функция насыщения вместо переключающей:
(7)
где для с и
состояния во время движения по криволинейной дороге была проведена серия тестов путем моделирования в среде Matlab/Simulink. Система подвергалась изменению уровня скорости на 30 км/ч или 8,32 м/с. Транспортное средство начинает с места до достижения скорости отсчета, как показано на рисунке 8 (а). На этом этапе работы на транспортном средстве выполняются три поворота: первый поворот налево (при t = 22 с), второй поворот направо (при t = 36 с) и последний поворот налево (при t = 36 с). t = 68 с). На рис. 8 (б) показаны изгибы дороги, положительная кривая соответствует повороту направо.
На этом рисунке показан угол поворота рулевого колеса, максимальное значение которого равно (7˚). Автомобиль поворачивает влево в момент t = 22 с за 10 с со скоростью 30 км/ч.
Водитель задает угол поворота, который начинается с угла поворота прямых колес (передних колес). Электронный дифференциал немедленно реагирует на два двигателя, снижая скорость левого ведущего колеса
Электронный дифференциал немедленно реагирует на два двигателя, снижая скорость левого ведущего колеса
(a)(b)(c)(d)(e)(f)(g)(h)(i)
Рисунок 8. Переходные реакции автомобиля на кривой дороге.
(связанный с двигателем), который находится внутри витка, и напротив того двигателя, который расположен снаружи витка, как показано на рисунке 8(c). В это время значения скорости двигателей изменяются, это изменение будет отражаться на электрических и механических величинах.
Когда скорость левого колеса уменьшается в соответствии с его новым заданием, крутящий момент имеет тенденцию менять знак вслед за резким скачком изменения скорости. Двигатель работает в режиме торможения, развивая отрицательный крутящий момент, который можно использовать для возврата энергии к источнику.
Двигатели развивают противоположные крутящие моменты, как показано на рис. 8(e), один из которых является кумулятивным для ускорения колеса снаружи, а другой дифференциальный для замедления колеса, находящегося внутри поворота.
На рис. 8(d) показаны линейные скорости ведущих колес. Как только скорость левого колеса стабилизируется, крутящий момент возвращается к значению соответствующего момента сопротивления, как показано на рисунке 8(g). На выходе из первого поворота в t = 31 с водитель задает противоположный угол поворота прямых колес и дифференциал действует таким же образом, чтобы сделать разность скоростей равной нулю.
Во время поворотов ведущие колеса проходят разные пути, они поворачиваются в одном направлении с разной скоростью. Эти скорости показаны на рисунке 8(c). Когда скорость правого колеса (R) увеличивается, момент двигателя, связанный с этим колесом, увеличивается и стремится догнать увеличение скорости.
На рис. 8(f) показаны силы тяги, создаваемые двигателями. На первом этапе мы замечаем большие силы тяги, создаваемые двигателями, которые заставляют автомобиль двигаться при трогании с места. Это кажется очевидным, поскольку эти силы должны преодолевать силы сопротивления продвижению автомобиля.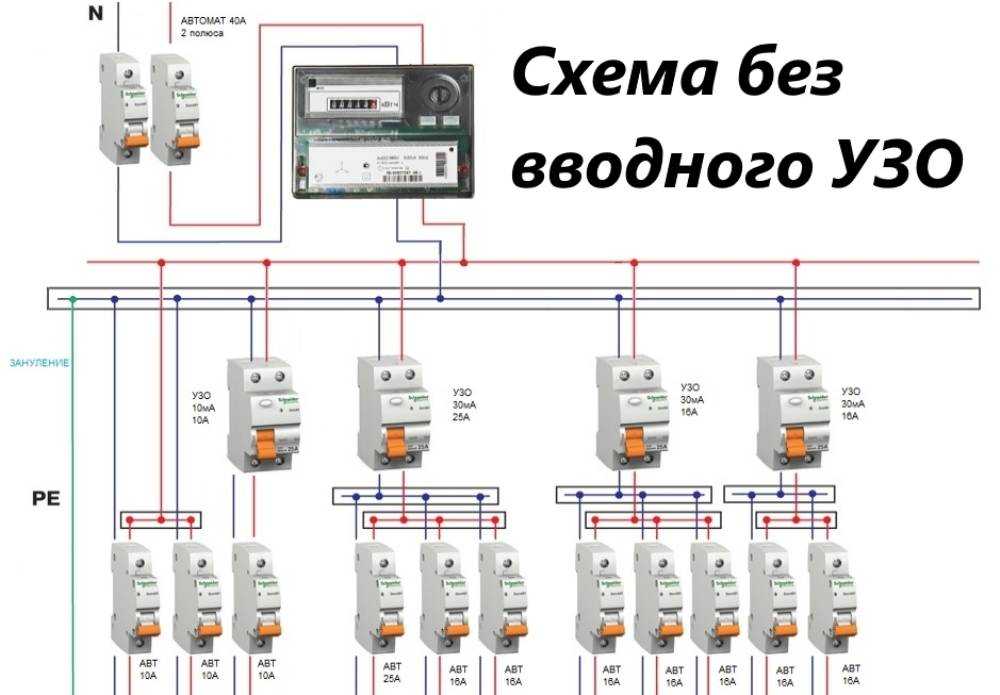 Также можно заметить расхождение между силами тяги при прохождении в поворотах.
Также можно заметить расхождение между силами тяги при прохождении в поворотах.
Действительно, двигатели, находящиеся внутри кривой поворота, создают тяговое усилие ниже, чем двигатели, находящиеся вне кривой. Аналогично для резистивных крутящих моментов, действующих на двигатели, как показано на рисунке 8(g).
Изменения фазных токов двигателей (M1 и M3) показаны на рисунках 8(h) и (i).
5. Заключение
В области электроприводов с переменной скоростью в данной статье представлено применение электромобиля, управляемого электронным дифференциалом. В этой статье предлагается структура управления «независимая машина», применяемая к двигательной установке посредством управления скоростью. Результаты, полученные путем моделирования, показывают, что эта структура позволяет спроектировать и реализовать электронный дифференциал и обеспечивает хорошие динамические и статические характеристики. В работе показано, что электронный дифференциал с высокой точностью управляет скоростью вращения ведущих колес как на ровных, так и на криволинейных дорогах.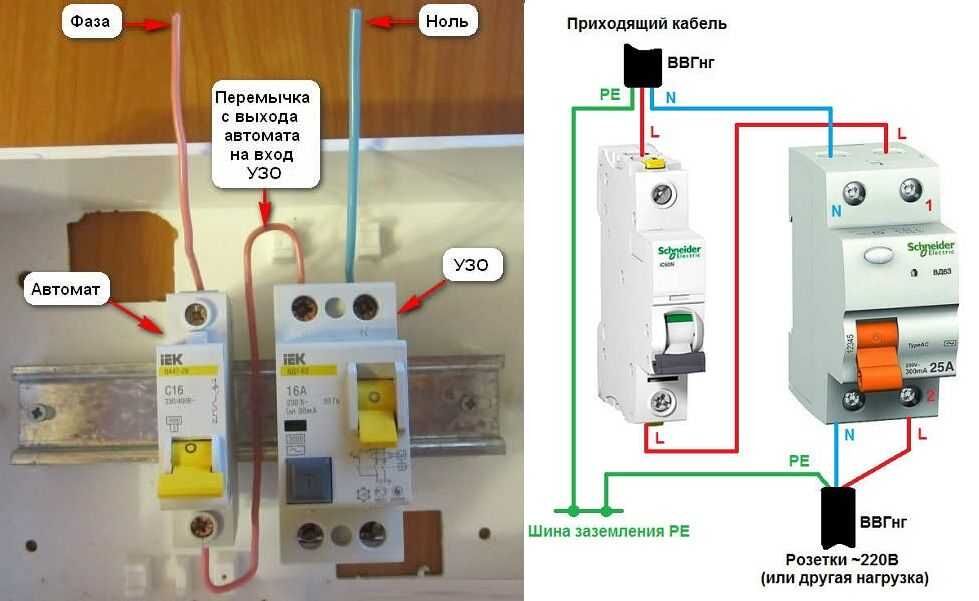 Помехи не влияют на работу приводных двигателей.
Помехи не влияют на работу приводных двигателей.
6. Благодарности
Автор хотел бы выразить глубокую благодарность Университету Хаиля в Саудовской Аравии за постоянную моральную поддержку и поощрение исследований.
ССЫЛКИ
- Й. Хори, «Водитель транспортных средств будущего с помощью электричества и исследования управления четырехколесным моторизованным UOT Electric March II», IEEE Transactions on Industrial Electronics, Vol. 51, № 5, 2004, стр. 954-962. doi:10.1109/TIE.2004.834944
- Ф. Таами, Р. Казами и С. Фарханги, «Новая система стабилизации для полноприводных электромобилей», IEEE Transactions on Vehicular Technology, Vol. 52, № 3, 2003, стр. 683-692. doi:10.1109/TVT.2003.811087
- А. Бускайлор, Б. Дават, Б. де Форнель и Б. Франсуа, «Многомашинная многоконвертерная система: применение для электромеханических приводов», Европейский физический журнал — прикладная физика, том. 10, № 2, 2000, стр. 131-147.
- А. Бускайлор, Б.
 Дават, Б. де Форнель и Б. Франсуа, «Многомашинная многоконвертерная система для приводов: анализ связи с помощью глобального моделирования», Труды IEEE-IAS, 2000, стр. 1474-1481. doi:10.1109/IAS.2000.882078
Дават, Б. де Форнель и Б. Франсуа, «Многомашинная многоконвертерная система для приводов: анализ связи с помощью глобального моделирования», Труды IEEE-IAS, 2000, стр. 1474-1481. doi:10.1109/IAS.2000.882078 - К.С. Чан и К.Т. Чан, «Обзор силовой электроники в электромобилях», IEEE, Vol. 44, № 1, 1997, стр. 3-13. doi:10.1109/41.557493
- Ю. Хори, Ю. Тойода и Ю. Цуруока, «Управление тяговым усилием электромобиля на основе оценки состояния дорожного покрытия. Основные экспериментальные результаты с использованием тестового EV UOT Electric March», IEEE Transactions on Industry Applications, Vol. 34, № 5, 1998, стр. 1131-1138. doi: 10.1109/28.720454
- В. И. Уткин, «Принципы проектирования управления скользящим режимом и приложения к электроприводам», IEEE Transactions on Industry Electron, Vol. 40, 1993, стр. 23-36. doi:10.1109/41.184818
- С.-И. Сакаи и Ю. Хори, «Преимущество электродвигателя для противоскольжения электромобиля», EPE Journal, Vol. 11, № 4, 2001, стр.
 Дават, Б. де Форнель и Б. Франсуа, «Многомашинная многоконвертерная система для приводов: анализ связи с помощью глобального моделирования», Труды IEEE-IAS, 2000, стр. 1474-1481. doi:10.1109/IAS.2000.882078
Дават, Б. де Форнель и Б. Франсуа, «Многомашинная многоконвертерная система для приводов: анализ связи с помощью глобального моделирования», Труды IEEE-IAS, 2000, стр. 1474-1481. doi:10.1109/IAS.2000.882078