Дифференциальный автомат защиты, описание и установка
Админ.
Дифференциальный автомат защиты — назначение
Дифференциальный автомат защиты или автоматический выключатель дифференциального тока это комплексное устройство обеспечивающее следующие функции:
- Дифавтомат защищает проводку от перегрузок;
- Защищает электро цепь от коротких замыканий;
- Обеспечивает пожарную безопасность;
- Также дифференциальный автомат защищает от поражений электротоком, следя за появлением в цепи дифференциального тока (разницы тока в проводах цепи).
По сути, дифавтомат заменяет УЗО (устройство защитного отключения) и автомат защиты (АВ). Обозначается дифавтомат, как УЗО-Д. Например, дифавтоматы «Энергокомплекс» обозначается, как УЗО-ВАД, УЗО-ВД. Импортные дифавтоматы обозначаются по стандарту CEI EN 61009 и маркируются, как DSH, SH.
Важно! Нужно понимать, что дифавтомат не устранит ощущение удара электротоком. Он отключит аварийную цепь за время, которое электроток не успеет нанести урон здоровью человека.
Для владельцев земельных участков, садоводов и огородников будет полезно знать, что лучшие форсунки для опрыскивателей можно выбрать на сайте https://hydromech.in.ua/ru/forsunki/. В каталоге сайте более сотни вариантов форсунок: маятниковые, вращающиеся, на трубу, на шланг, с одной или тремя головками.
Установка дифавтомата защиты
При установке устройства соблюдайте требования электробезопасности.
Установка дифавтомата защиты производится в электрических щитках. Рекомендуется, устанавливать вводной дифавтомат на этаже в этажном щите, а дифавтоматы на отдельные группы розеток квартиры устанавливать в квартирном электрощите.
Устанавливается дифавтомат на дин-рейку. Подвод электропитания осуществляться сверху, вывод осуществляется с нижних клемм.
Заземление электро цепи
Корректная защита от косвенного прикосновения возможна только при организации заземления, например, системы заземления TN-S.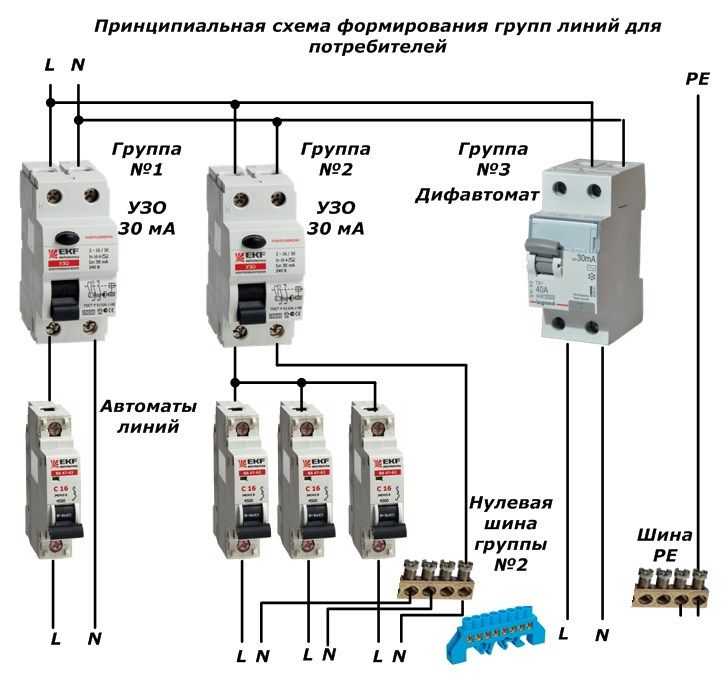
В зоне действия УЗО-Д нулевой рабочий проводник (N) не должен соединяться с заземленными корпусами электроприборов и нулевым защитным проводником (PE).
Типы и номиналы дифавтоматов защиты
В жилых помещениях с компьютерами, телевизором, приборами с электронным управлением и другими приборами, создающими пульсирующие составляющие тока, ставятся дифавтоматы типа «А». В других сетях достаточно дифавтоматов типа «АС».
В групповых цепях квартиры, питающих штепсельные розетки, ставятся УЗО номиналом не более 30mA. Для группы электропроводки ванной желательно поставить дифавтомат с током отсечки 10 mA. На группы освещения дифавтоматы не ставятся.
Согласно ПУЭ, ток утечки диффавтомата для электроприбора выбирается из расчета 0,4mA на 1 Ампер тока нагрузки. Ток утечки диффавтомата сети, выбирается из расчета 0,01 mA на 1 метр фазного провода.
Для повышения пожарной безопасности дома, квартиры нужно на ввод электропитания установить УЗО-Д с током отсечки 100mA или 300mA. Обычно в квартирах, такие «дифы» не ставятся.
Обычно в квартирах, такие «дифы» не ставятся.
Проверка работоспособности дифавтомата
Для проверки исправности автоматического выключателя дифференциального тока (АВДТ) на корпусе устройства есть кнопка тестирования. Проверку устройства нужно производить сразу после установки и потом, раз в месяц.
Дифференциальный автомат защиты: Схема подключения
Приведу две схемы подключения дифавтомата защиты.
Схема №1
Схема установки одного дифавтомата на всю электросеть
Схема№2
Желательно, для каждого прибора нуждающегося в защите, ставить отдельный дифавтомат защиты.
Нормативные ссылки дифференциальный автомат защиты
ПУЭ изд. 7, п. 7.1.67-7.1.86.
©ehto.ru
Еще статьи
Защита электрикидифавтомат что это такое, дифференциальный автомат защиты, защита проводки, ссылка, схема электропроводки квартиры дома, ток электрический, устройство электрики, цепь электрическая квартиры домаБезопасность сети: УЗО, автоматы, диф.
 автоматы — Статьи | Два Электрика
автоматы — Статьи | Два Электрика
Любая система имеет свой предел прочности – и биологическая, и механическая, и электрическая. И если мы хотим, чтобы система работала долго и выполняла все свои функции, нам нужно позаботиться о ее защите.
От чего необходимо защитить электрическую сеть? В первую очередь – от перегрузок и короткого замыкания.
Когда-то для таких целей повсеместно использовались керамические пробки, или плавкие предохранители. Они защищали сеть от перегрева и возгорания – эти неприятности могли случиться при резком увеличении силы тока в цепи. Такие предохранители были одноразовыми – при высокой нагрузке металлические их части плавились, разрывая электрическую цепь.
Это случалось довольно часто. Стоило включить зимой
мощный обогреватель – и всё: в квартире раздается громкий хлопок, и свет
гаснет. Хозяева квартиры впотьмах ищут свечу или фонарик и идут проверять
предохранители.
Сегодня проводка в квартире выдерживает гораздо более серьезные нагрузки. Ну а плавкие предохранители уходят (а где-то уже окончательно ушли) в прошлое, им на смену приходят автоматические выключатели, или просто автоматы.
Автомат защиты – это корпус, сделанный из
диэлектрика, внутри которого находятся два контакта — подвижный и неподвижный.
Подвижный контакт включен в сеть при помощи пружины. Когда нагрузка в сети
превышает допустимую, тепловой или электромагнитный расцепитель автоматически
меняют натяжение пружины, подвижный контакт выходит из цепи – и в итоге цепь
размыкается.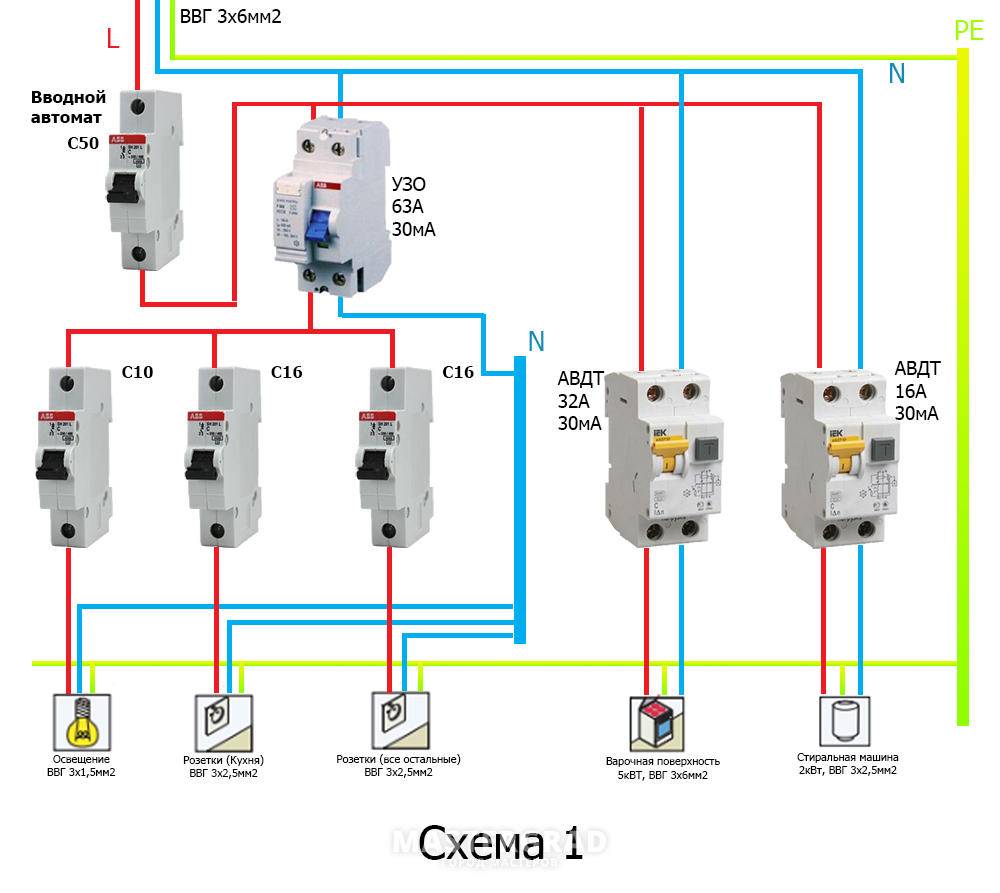
Главное отличие автомата от плавкого предохранителя – возможность его многократного использования. То есть после устранения перегрузок в сети автомат защиты снова можно включить, и цепь заработает.
Автоматы – необходимый защитный элемент цепи, но не достаточный. Ведь автоматические выключатели не могут защитить человека от случайного удара электрическим током. Для этой цели предназначены УЗО, или устройства защитного отключения.
Их принцип работы очень прост. УЗО следит за утечкой тока. Если человек случайно прикоснется к оголенному проводу, часть тока будет проходить через его тело – вот она, утечка. УЗО тут же заметит недостаток тока в цепи и немедленно, в течение 0,02 сек, разомкнет цепь. В результате человек получит не сильное поражение электричеством, а лишь слабый и не опасный для здоровья удар.
В частных домах УЗО могут среагировать и на мелких
грызунов, которые захотят попробовать на вкус электропроводку. Стоит крысе
попытаться перегрызть кабель – сработает УЗО. Правда, грызун свой удар током
все равно получить успеет.
Стоит крысе
попытаться перегрызть кабель – сработает УЗО. Правда, грызун свой удар током
все равно получить успеет.
Обычно на группу из нескольких розеток устанавливают УЗО, реагирующее на ток утечки 30 мА. Существуют и более чувствительные УЗО – 10 мА. Их стоит установить на линии детской комнаты или ванной.
Существует устройство, объединяющее защитный автомат и УЗО. Оно называется дифференциальный автомат и служит защитой как от перегрузок в сети, так и от ударов током.
В чем преимущество дифференциального автомата? Он занимает меньше места, чем два других защитных элемента. В то же время стоимость диф-автомата такова, что дешевле будет приобрести и установить два обычных защитных устройства — УЗО и автомат, чем один комплексный агрегат.
Стоит добавить, что выбирать, а также устанавливать
защитные элементы должны профессионалы. На безопасности экономить не надо –
потери могут оказаться куда более серьезными.
Цены на установку Автоматических выключателей, Диф. автоматов и УЗО.
Наша компания занимается полным комплексом электромонтажных работ в квартире.
Упрощенный электронный дифференциал с скользящим режимом для электромобиля с двумя независимыми приводами колес
Электронный дифференциал с упрощенным режимом скольжения для электромобиля с двумя независимыми ведущими колесами
Азеддин Драу
Факультет электротехники, Хаильский университет, Хаиль, Саудовская Аравия
Электронная почта: [email protected]
Copyright © 2013 Azeddine Draou. Это статья с открытым доступом, распространяемая в соответствии с лицензией Creative Commons Attribution License, которая разрешает неограниченное использование, распространение и воспроизведение на любом носителе при условии надлежащего цитирования оригинальной работы.
Поступила в редакцию 19.05.2013 г.; пересмотрено 19 июня 2013 г.; принято 26 июня 2013 г.
Ключевые слова: Электромобиль; Управление скользящим режимом; электронный дифференциал; Синхронный двигатель с постоянными магнитами; Многомашинная многоконвертерная система
АННОТАЦИЯ
В данной статье представлена простая стратегия управления скользящим режимом, используемая для электронной дифференциальной системы электромобиля с двумя независимыми ведущими колесами.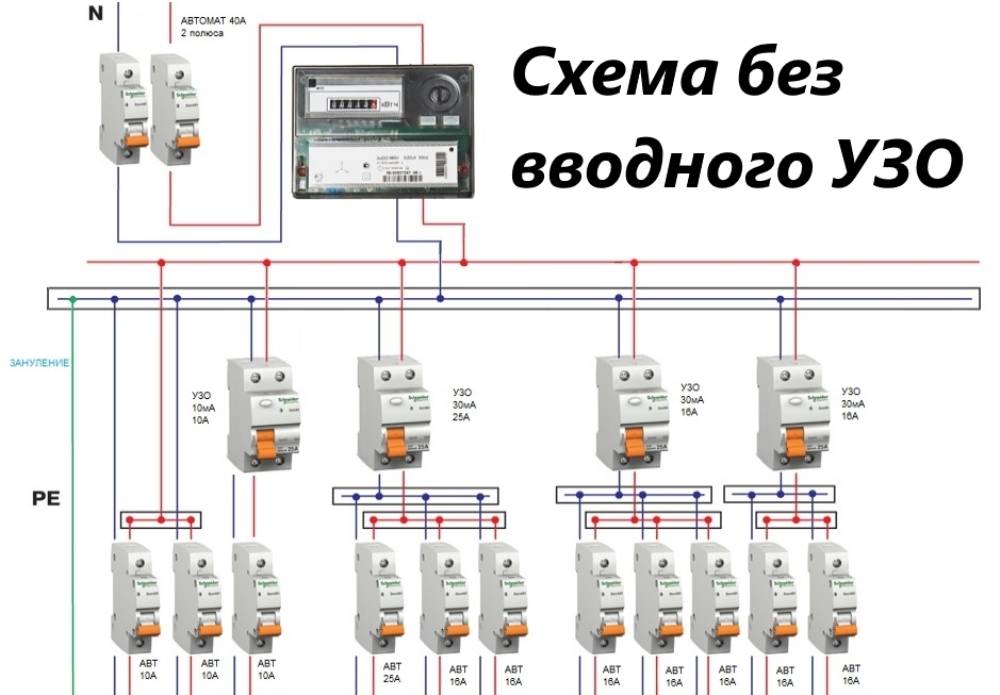 Когда транспортное средство движется по криволинейной дороге, скорость внутреннего колеса должна отличаться от скорости внешнего колеса, чтобы транспортное средство не вибрировало и не двигалось по неровной траектории. Поскольку каждое колесо этого электромобиля имеет независимую движущую силу, для замены системы зубчатого дифференциала требуется электрическая дифференциальная система. Однако трудно анализировать нелинейное поведение дифференциальной системы в зависимости от скорости и угла поворота рулевого колеса, а также конструкции автомобиля. Предлагаемая двигательная установка состоит из двух синхронных машин с постоянными магнитами, обеспечивающих привод двух задних ведущих колес. Предлагаемая структура управления, называемая независимыми машинами для контроля скорости, позволяет получить электронный дифференциал, который обеспечивает контроль поведения автомобиля на дороге. Он также позволяет независимо контролировать каждое ведущее колесо, чтобы оно вращалось с разной скоростью по любому изгибу.
Когда транспортное средство движется по криволинейной дороге, скорость внутреннего колеса должна отличаться от скорости внешнего колеса, чтобы транспортное средство не вибрировало и не двигалось по неровной траектории. Поскольку каждое колесо этого электромобиля имеет независимую движущую силу, для замены системы зубчатого дифференциала требуется электрическая дифференциальная система. Однако трудно анализировать нелинейное поведение дифференциальной системы в зависимости от скорости и угла поворота рулевого колеса, а также конструкции автомобиля. Предлагаемая двигательная установка состоит из двух синхронных машин с постоянными магнитами, обеспечивающих привод двух задних ведущих колес. Предлагаемая структура управления, называемая независимыми машинами для контроля скорости, позволяет получить электронный дифференциал, который обеспечивает контроль поведения автомобиля на дороге. Он также позволяет независимо контролировать каждое ведущее колесо, чтобы оно вращалось с разной скоростью по любому изгибу.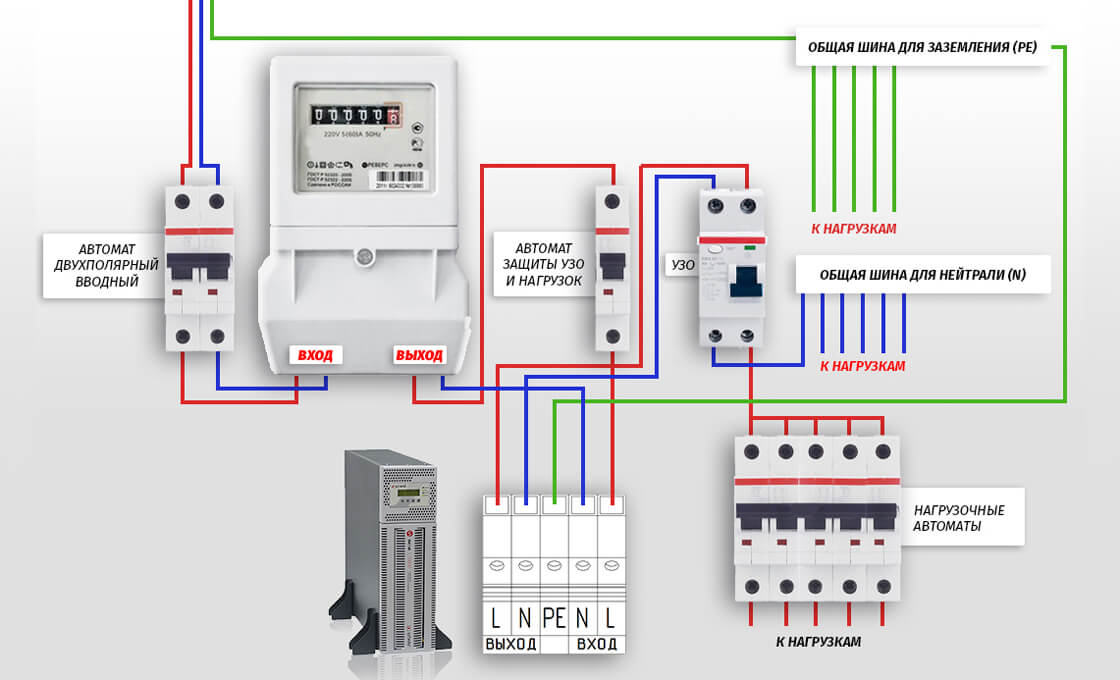 В данной статье представлены результаты анализа и моделирования предлагаемой системы.
В данной статье представлены результаты анализа и моделирования предлагаемой системы.
1. Введение
Электромобиль с двигателями в колесах имеет замечательное преимущество в быстром создании точного крутящего момента на каждом ведущем колесе [1,2]. Некоторые приложения в области электроприводов требуют использования нескольких электрических машин и столько же статических преобразователей, занимающих важное место среди электромеханических систем. Эти системы получили название многоконверторных многомашинных систем (ММС) [3]. Разработан формализм для изучения систем, состоящих из нескольких электрических машин и/или силовых преобразователей. Он указывает на три энергетические связи внутри цепей электромеханического преобразования: электрическую, магнитную и механическую связь. Для управления такими системами предлагаются адаптивные правила, основанные на принципе инверсии. Энергетические критерии перераспределения должны быть определены для решения проблем связи [4]. Они распознаются по наличию типа соединительной системы электрического, магнитного и/или механического типа, используемого в нескольких электрических машинах, приводящих в движение транспортное средство. В такой системе мы моделируем связь, используя соответствующие структуры, включая независимое управление, ведомый-ведущий, накладывая критерии распределения энергии, чтобы получить единую машину или единую систему преобразователя. Одна из этих управляющих структур может применяться для управления ведущими колесами электромобиля.
В такой системе мы моделируем связь, используя соответствующие структуры, включая независимое управление, ведомый-ведущий, накладывая критерии распределения энергии, чтобы получить единую машину или единую систему преобразователя. Одна из этих управляющих структур может применяться для управления ведущими колесами электромобиля.
2. Предлагаемая тяговая система
Классическая схема тяговой системы электромобиля представлена на рисунке 1 [5].
Рис. 1. Обычная конструкция автомобиля с одним центральным двигателем.
На рис. 2 показана конструкция электромобиля, два задних колеса приводятся в движение двумя тяговыми двигателями через редукторы и карданные валы [6]. На этом рисунке представлена реализованная конфигурация транспортного средства с двумя синхронными двигателями с постоянными магнитами для двух независимых колес.
Многомашинные системы характеризуются соединением различных систем электромеханического преобразования. Система, представленная на рис. 2, характеризуется только одной муфтой, которая показана на рис. 3. Для разработки электронного дифференциала к силовой установке двух ведущих колес применяется структура управления «независимые машины» посредством управления скоростью, как показано на рис. 4.
2, характеризуется только одной муфтой, которая показана на рис. 3. Для разработки электронного дифференциала к силовой установке двух ведущих колес применяется структура управления «независимые машины» посредством управления скоростью, как показано на рис. 4.
Независимая система управления машиной
Эта структура состоит из двух машин, управляемых независимо как две отдельные структуры машины. Для каждой машины мы можем задать разное задание скорости () с помощью двух статических преобразователей. Эти машины не связаны через структуру управления и отвергают все помехи, как управление одной машиной.
Рис. 2. Конструкция автомобиля с двумя независимыми задними приводами.
Рис. 3. Исследуемая топология.
Рис. 4. Независимая структура машины.
принцип этого управления показан на рисунке 4.
Энергетическое макроскопическое представление (ЭМИ) двигательной установки было предложено для получения общего представления об электронном дифференциале, как показано на рисунке 5.
Это исследование предлагает управление скоростями ведущих колес и структурой управления «независимые машины». Эта структура позволяет наложить два задания скорости (т. е. по кривой), приложенный крутящий момент к каждому колесу разный, система управления двумя колесами не получает одинаковое задание крутящего момента. Таким образом, невозможно установить одно и то же задание скорости.
Электронная дифференциальная система использует скорость автомобиля и угол поворота рулевого колеса в качестве входных параметров и рассчитывает требуемую скорость внутреннего и внешнего колес, когда два задних колеса управляются независимо двумя двигателями PMS. Входными данными эталонного блока являются скорость транспортного средства и угол поворота рулевого колеса, а выходными данными являются требуемые скорости вращения внутреннего и внешнего колес, называемые эталонными скоростями. В зависимости от направления угла поворота рулевого колеса (влево или вправо) скорость вращения внутреннего и внешнего колес соотносится со скоростью вращения левого и правого колес соответственно.![]()
Силовая структура состоит из двух синхронных двигателей с постоянными магнитами, которые питаются от двух трехфазных инверторов и приводят в движение два задних колеса автомобиля через редукторы, как показано на рисунке 6.
3. Векторное управление
Рисунок 7 иллюстрирует Схема векторного управления синхронным двигателем с постоянными магнитами. Он представляет собой систему управления скоростью и током.
Для упрощения алгоритма управления и повышения надежности контура управления предлагается использовать стратегию управления скользящим режимом.
Уравнения PMSM имеют следующий вид:
(1)
где
(2)
900 02 Рисунок 5. ЭМИ электронной дифференциальной системы.Рисунок 6. Компоненты предлагаемой системы.
Рис. 7. Блок-схема системы электропривода двигателей с постоянными магнитами.
— Регулятор скользящего режима скорости и тока Используя нелинейную модель СДПМ «Уравнение (1)», можно спроектировать регулятор скользящего режима как скорости, так и тока [7,8]. Определим поверхность скольжения
Определим поверхность скольжения
(3)
где и — задание скорости и ток статора соответственно.
Чтобы определить закон управления, который должен свести функцию скольжения (3) к нулю за конечное время, необходимо рассмотреть динамику, описываемую:
(4)
где
В методе устойчивости Ляпонова используется для обеспечения привлекательности и инвариантности, должно выполняться следующее условие
(5)
Таким образом, можно выбрать следующий закон управления переключением напряжений статора:
(6)
где,
Скользящий режим вызывает резкие изменения управляющей переменной, вносящие высокочастотные помехи. Для уменьшения явления дребезга введена функция насыщения вместо переключающей:
(7)
где для с и
состояния во время движения по криволинейной дороге была проведена серия тестов путем моделирования в среде Matlab/Simulink. Система подвергалась изменению уровня скорости на 30 км/ч или 8,32 м/с. Транспортное средство начинает с места до достижения скорости отсчета, как показано на рисунке 8 (а). На этом этапе работы на транспортном средстве выполняются три поворота: первый поворот налево (при t = 22 с), второй поворот направо (при t = 36 с) и последний поворот налево (при t = 36 с). t = 68 с). На рис. 8 (б) показаны изгибы дороги, положительная кривая соответствует повороту направо.
Транспортное средство начинает с места до достижения скорости отсчета, как показано на рисунке 8 (а). На этом этапе работы на транспортном средстве выполняются три поворота: первый поворот налево (при t = 22 с), второй поворот направо (при t = 36 с) и последний поворот налево (при t = 36 с). t = 68 с). На рис. 8 (б) показаны изгибы дороги, положительная кривая соответствует повороту направо.
На этом рисунке показан угол поворота рулевого колеса, максимальное значение которого равно (7˚). Автомобиль поворачивает влево в момент t = 22 с за 10 с со скоростью 30 км/ч.
Водитель задает угол поворота, который начинается с угла поворота прямых колес (передних колес). Электронный дифференциал немедленно реагирует на два двигателя, снижая скорость левого ведущего колеса
(a)(b)(c)(d)(e)(f)(g)(h)(i)
Рисунок 8. Переходные реакции автомобиля на кривой дороге.
(связанный с двигателем), который находится внутри витка, и напротив того двигателя, который расположен снаружи витка, как показано на рисунке 8(c). В это время значения скорости двигателей изменяются, это изменение будет отражаться на электрических и механических величинах.
В это время значения скорости двигателей изменяются, это изменение будет отражаться на электрических и механических величинах.
Когда скорость левого колеса уменьшается в соответствии с его новым заданием, крутящий момент имеет тенденцию менять знак вслед за резким скачком изменения скорости. Двигатель работает в режиме торможения, развивая отрицательный крутящий момент, который можно использовать для возврата энергии к источнику.
Двигатели развивают противоположные крутящие моменты, как показано на рисунке 8(e), один из которых является кумулятивным для ускорения колеса снаружи, а другой дифференциальный для замедления колеса, находящегося внутри поворота.
На рис. 8(d) показаны линейные скорости ведущих колес. Как только скорость левого колеса стабилизируется, крутящий момент возвращается к значению соответствующего момента сопротивления, как показано на рисунке 8(g). На выходе из первого поворота в t = 31 с водитель задает противоположный угол поворота прямых колес и дифференциал действует таким же образом, чтобы сделать разность скоростей равной нулю.
Во время поворотов ведущие колеса проходят разные пути, они поворачиваются в одном направлении с разной скоростью. Эти скорости показаны на рисунке 8(c). Когда скорость правого колеса (R) увеличивается, момент двигателя, связанный с этим колесом, увеличивается и стремится догнать увеличение скорости.
На рис. 8(f) показаны силы тяги, создаваемые двигателями. На первом этапе мы замечаем большие силы тяги, создаваемые двигателями, которые заставляют автомобиль двигаться при трогании с места. Это кажется очевидным, поскольку эти силы должны преодолевать силы сопротивления продвижению автомобиля. Также можно заметить расхождение между силами тяги при прохождении в поворотах.
Действительно, двигатели, находящиеся внутри кривой поворота, создают тяговое усилие ниже, чем те двигатели, которые находятся вне кривой. Аналогично для резистивных крутящих моментов, действующих на двигатели, как показано на рисунке 8(g).
Изменения фазных токов двигателей (M1 и M3) показаны на рисунках 8(h) и (i).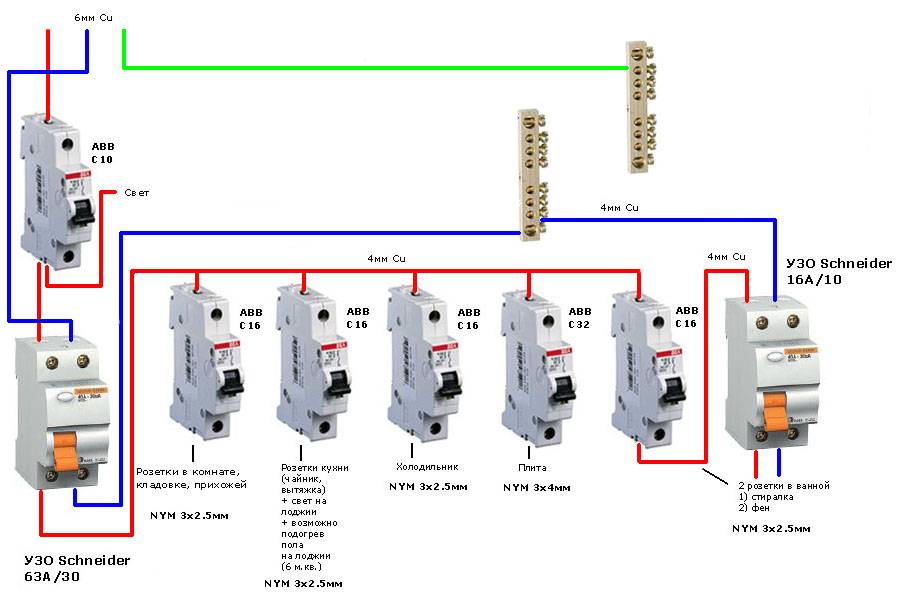
5. Заключение
В области электроприводов с переменной скоростью в данной статье представлено применение электромобиля, управляемого электронным дифференциалом. В этой статье предлагается структура управления «независимая машина», применяемая к двигательной установке посредством управления скоростью. Результаты, полученные путем моделирования, показывают, что эта структура позволяет спроектировать и реализовать электронный дифференциал и обеспечивает хорошие динамические и статические характеристики. В работе показано, что электронный дифференциал с высокой точностью управляет скоростью вращения ведущих колес как на ровных, так и на криволинейных дорогах. Помехи не влияют на работу приводных двигателей.
6. Благодарности
Автор хотел бы выразить глубокую благодарность Университету Хаиля в Саудовской Аравии за постоянную моральную поддержку и поощрение исследований.
ССЫЛКИ
- Й. Хори, «Водитель транспортных средств будущего с помощью электричества и исследования управления четырехколесным моторизованным UOT Electric March II», IEEE Transactions on Industrial Electronics, Vol.
 51, № 5, 2004, стр. 954-962. doi:10.1109/TIE.2004.834944
51, № 5, 2004, стр. 954-962. doi:10.1109/TIE.2004.834944 - Ф. Таами, Р. Казами и С. Фарханги, «Новая система стабилизации для полноприводных электромобилей», IEEE Transactions on Vehicular Technology, Vol. 52, № 3, 2003, стр. 683-692. doi:10.1109/TVT.2003.811087
- А. Бускайлор, Б. Дават, Б. де Форнель и Б. Франсуа, «Многомашинная многоконвертерная система: применение для электромеханических приводов», Европейский физический журнал — прикладная физика, том. 10, № 2, 2000, стр. 131-147.
- А. Бускайлор, Б. Дават, Б. де Форнель и Б. Франсуа, «Многомашинная многоконвертерная система для приводов: анализ связи с помощью глобального моделирования», Труды IEEE-IAS, 2000, стр. 1474-1481. doi:10.1109/IAS.2000.882078
- К.С. Чан и К.Т. Чан, «Обзор силовой электроники в электромобилях», IEEE, Vol. 44, № 1, 1997, стр. 3-13. doi:10.1109/41.557493
- Ю. Хори, Ю. Тойода и Ю. Цуруока, «Управление тяговым усилием электромобиля на основе оценки состояния дорожного покрытия. Основные экспериментальные результаты с использованием тестового EV UOT Electric March», IEEE Transactions on Industry Applications, Vol. 34, № 5, 1998, стр. 1131-1138. doi: 10.1109/28.720454
- В. И. Уткин, «Принципы проектирования управления скользящим режимом и приложения к электроприводам», IEEE Transactions on Industry Electron, Vol. 40, 1993, стр. 23-36. doi:10.1109/41.184818
- С.-И. Сакаи и Ю. Хори, «Преимущество электродвигателя для противоскольжения электромобиля», EPE Journal, Vol. 11, № 4, 2001, стр. 26-32.
 51, № 5, 2004, стр. 954-962. doi:10.1109/TIE.2004.834944
51, № 5, 2004, стр. 954-962. doi:10.1109/TIE.2004.834944 Основные экспериментальные результаты с использованием тестового EV UOT Electric March», IEEE Transactions on Industry Applications, Vol. 34, № 5, 1998, стр. 1131-1138. doi: 10.1109/28.720454
Основные экспериментальные результаты с использованием тестового EV UOT Electric March», IEEE Transactions on Industry Applications, Vol. 34, № 5, 1998, стр. 1131-1138. doi: 10.1109/28.720454Сокращения
DFOC: Прямое управление, ориентированное на поле EC: Электрическая связь EM: Электрическая машина EMR: Энергетическое макроскопическое представление ES: Электрический источник EV: Электромобиль MMS: Многомашинная многоконвертерная система MS: Механический источник PMSM: Постоянный магнит Синхронная машинная ШИМ: Импульс с модуляцией
Номенклатура
,: и осевая индуктивность
,: и осевые токи
,: и осевое напряжение
: Сопротивление
: Пары полюсов
: Электрическое положение
: Поток постоянного магнита
: Инерция ротора
: Инерция транспортного средства
: Электромагнитный крутящий момент
: Момент нагрузки
: Масса транспортного средства
: Радиус колеса
: Отчет о скорости передачи
: Эффективность передачи
: Расстояние между двумя колесами и осями
: Расстояние между задним и передним колесами
: Плотность воздуха
: Передняя часть автомобиля
: Аэродинамический коэффициент
: Ускорение свободного падения
90 002 : Коэффициент трения: Угол наклона
: Линейная скорость автомобиля
: Напряжение аккумулятора
Разница между дифференциальными переключателями — Automatismos_Xl_Mundo
Всем привет.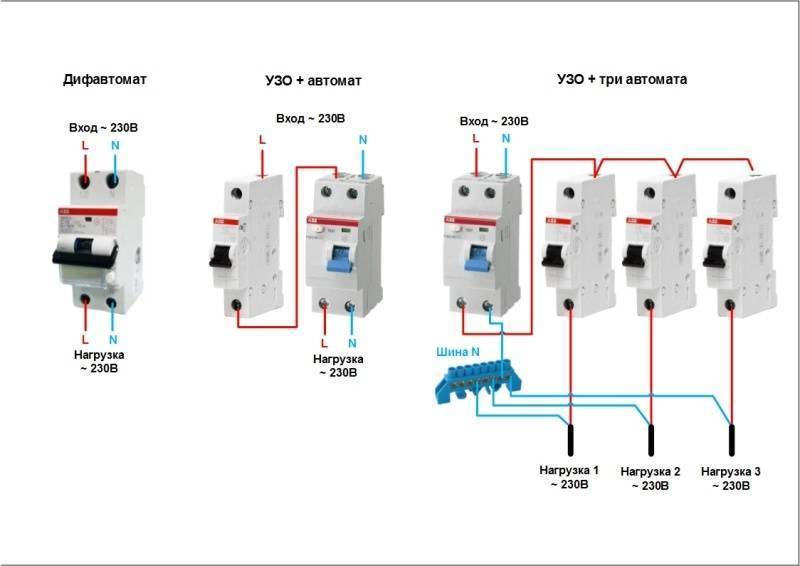 Сегодня мы хотим посвятить эту статью разъяснению всего, что связано с разницей между Дифференциальные переключатели и их практическое применение.
Сегодня мы хотим посвятить эту статью разъяснению всего, что связано с разницей между Дифференциальные переключатели и их практическое применение.
Это будет достаточно полная статья, где мы дополним ее аудиовизуальным материалом, чтобы в конце прочтения не осталось сомнений.
И без лишних слов начинаем!!!
Что такое дифференциальный переключатель и для чего он используется?
Дифференциальные выключатели представляют собой не что иное, как электромагнитные устройства, основная функция которых и для чего они были разработаны – физическая защита людей. Эта защита будет осуществляться либо путем прямого контакта с любой активной частью установки, либо косвенно посредством какого-либо шунта из-за плохой изоляции любого установленного элемента.
Изображение взято из Schneider Electric
Дифференциальные выключатели можно найти в любом электрическом щите или цепи, как промышленной, так и бытовой.
Держу пари, лайк этой статье, что если вы сейчас пойдете и взглянете на электрощит вашего дома, вы обязательно его найдете.
Теперь мы объясним, как работают дифференциальные переключатели .
Как работают дифференциальные переключатели?
Напомним, что в электрической цепи входящий ток будет равен исходящему току, если все работает правильно. В случае дифференциального автоматического выключателя это устройство, которое определяет, равен ли исходящий ток входящему току. Если это не так, и он обнаружит любую аномалию (утечку на землю), он сработает для защиты людей и оборудования, подключенного к цепи.
Мы должны знать, что дифференциальные выключатели регулируются по чувствительности срабатывания, будучи наиболее распространенными и наиболее часто используемыми в домах, по крайней мере, 30 мА (миллиампер). Это означает, что в тот момент, когда дифференциальный выключатель обнаружит утечку тока выше этой силы, он немедленно отключится, так как он обнаружил аномалию в работе цепи или возможную утечку тока на землю.
На следующем изображении показаны части дифференциального автоматического выключателя.
Части дифференциального выключателяКлассификация дифференциальных автоматических выключателей по времени их срабатывания
Перед тем, как полностью перейти к типам дифференциальных выключателей, я хочу прояснить следующие концепции, которые вы увидите в следующих разделах.
Существует дополнительная классификация этих устройств в соответствии с их временем срабатывания, и их можно разделить на следующие категории:
Считается наиболее распространенным временем срабатывания в этих устройствах, и в эту классификацию входят все выключатели дифференциального тока. которые не имеют какой-либо задержки срабатывания при наличии аномалии. Это означает, что эти устройства отключаются в момент обнаружения проблемы.
Эта модель селективного дифференциального выключателя или также называемая задержкой используется, когда нам нужно изолировать или ограничить отключение питания только в областях, которые были затронуты обнаруженным шунтом. Этот тип применения чаще всего используется в промышленных или крупных установках. Благодаря этим устройствам гарантируется, что в случае сбоев мы не остановим весь источник питания, влияющий на производительность сложных производственных процессов.
Этот тип применения чаще всего используется в промышленных или крупных установках. Благодаря этим устройствам гарантируется, что в случае сбоев мы не остановим весь источник питания, влияющий на производительность сложных производственных процессов.
Классы дифференциальных выключателей?
Автоматические выключатели дифференциального тока класса или типа переменного тока являются наиболее распространенным типом автоматических выключателей, которые можно найти в любой системе электрозащиты. Этот тип защиты обеспечивает защиту цепи и ее отключение в случае дифференциальных токов, которые могут возникать внезапно или постепенно.
Schneider Трехфазный дифференциал переменного тока
Диапазоны этих устройств могут достигать 100 или 125 ампер, в некоторых случаях в их версиях мгновенного или селективного действия (мы увидим эту концепцию позже) и с чувствительностью от 10 до 500 миллиампер. ампер.
Эти дифференциальные выключатели защищают от переменного тока и позволяют избежать несвоевременных перекрытий, вызванных внешними факторами. Они также обеспечивают защиту от выпрямленных токов с постоянной составляющей или без нее.
Они также обеспечивают защиту от выпрямленных токов с постоянной составляющей или без нее.
Дифференциальные выключатели класса А специально разработаны для защиты цепей с электронными приемниками, включающими выпрямление синусоидального сигнала.
Дифференциальный автоматический выключатель класса A-SI или A-Superimmunized, который у некоторых производителей, таких как LEGRAND, обычно известен как дифференциальный автоматический выключатель типа F, является еще более надежным и выгодным устройством, чем его младший брат, класс A.
Изображение взято из Ilumitec
Его главное усовершенствование заключается в том, что он имеет высокочастотные фильтры, которые позволяют различать, действительно ли произошло замыкание на землю или это было что-то пунктуальное, вызвавшее ложное срабатывание в цепи. Это часто бывает, когда одновременно работает несколько компьютерных устройств. Благодаря встроенной электронике обеспечивается большая устойчивость к несвоевременному срабатыванию и лучший КПД, так как эти устройства срабатывают только при обнаружении опасного для людей тока замыкания.
Наконец, мы должны сказать, что дифференциальные выключатели класса B в основном предназначены для защиты цепей, таких как трехфазные приводы с регулируемой скоростью, зарядные устройства или системы бесперебойного питания (ИБП), где используется класс A или A-SI. Дифференциальных выключателей недостаточно из-за наличия непрерывных токов утечки.
Изображение взято с Eibabo
Эти устройства предназначены для защиты от переменного тока и токов малой силы. Вы можете сделать вывод из вышеупомянутых приложений, что эти устройства в основном используются в промышленных условиях.
Рекомендации по классам дифференциальных выключателей
Необходимо учитывать, что каждый производитель использует свою номенклатуру при проектировании своих устройств, что может привести к большой путанице при выборе нужного нам. Несмотря на то, что это происходит, мы всегда должны понимать, что ранее упомянутые классы являются базовыми и используются Нормативом.
Вы всегда должны четко понимать, для каких целей вам нужен этот тип устройства.